The conventional diagram of this motor is shown in Figure 11.45. In these motors, the shunt field current Ish = V/Rsh remains constant since the supply voltage V is constant. Hence, the flux in DC shunt motors is practically constant (although at heavy loads, somewhat flux decreases due to armature reaction).
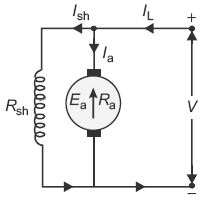
Fig. 11.45 Conventional diagram of a DC shunt motor
- N − Ia characteristics: We know that,
 Since flux is constant, N ∝ Eb or N ∝ V − Ia Ra. If the armature drop (IaRa) is negligible, the speed of the motor will remain constant for all values of load as shown by the dotted line AB in Figure 11.46. However, strictly speaking, as the armature current increases due to the increase of load, armature drop IaRa increases and speed of the motor decreases slightly as shown by the straight line AC in Figure 11.46 (neglecting armature reaction). Moreover, the characteristic curve does not start from a point of zero armature current because a small current, no-load armature current Ia0, is necessary to maintain rotation of the motor at no-load.
Since flux is constant, N ∝ Eb or N ∝ V − Ia Ra. If the armature drop (IaRa) is negligible, the speed of the motor will remain constant for all values of load as shown by the dotted line AB in Figure 11.46. However, strictly speaking, as the armature current increases due to the increase of load, armature drop IaRa increases and speed of the motor decreases slightly as shown by the straight line AC in Figure 11.46 (neglecting armature reaction). Moreover, the characteristic curve does not start from a point of zero armature current because a small current, no-load armature current Ia0, is necessary to maintain rotation of the motor at no-load. 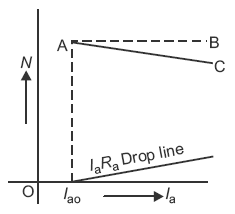 Fig. 11.46 N-Ia characteristics of DC shunt motorSince there is no appreciable change in the speed of a DC shunt motor from no-load to full-load, it is considered to be a constant speed motor. This motor is best suited where almost constant speed is required and the load may be thrown off totally and suddenly.
Fig. 11.46 N-Ia characteristics of DC shunt motorSince there is no appreciable change in the speed of a DC shunt motor from no-load to full-load, it is considered to be a constant speed motor. This motor is best suited where almost constant speed is required and the load may be thrown off totally and suddenly. - T − la characteristics: We know that, T ∝ ɸ la. Since flux is constant, T ∝ la. Hence, the electrical characteristic (i.e., T − Ia) is a straight line passing through the origin as shown in Figure 11.47. It is clear from the characteristic curve that a large armature current is required at the start, if machine is on heavy load. Thus, shunt motor should never be started on load.
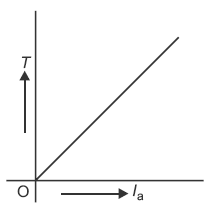 Fig. 11.47 T-Ia characteristics of DC shunt motor
Fig. 11.47 T-Ia characteristics of DC shunt motor - N − T characteristics: The N − T characteristic is derived from the first two characteristics. When load torque increases, armature current Ia increases, but speed decreases slightly. Thus, with the increase in load or torque, the speed decreases slightly as shown in Figure 11.48.
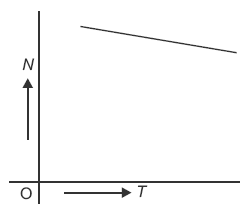 Fig. 11.48 N-T characteristics of DC shunt motor
Fig. 11.48 N-T characteristics of DC shunt motor
11.23 CHARACTERISTICS OF SERIES MOTORS
The conventional diagram a series motor is shown in Figure 11.49. In these motors, the series field winding carries the armature current. Therefore, the flux produced by the series field winding is proportional to the armature current before magnetic saturation, but after magnetic saturation flux becomes constant.
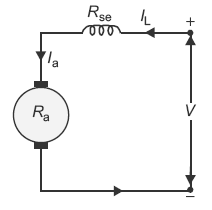
Fig. 11.49 Conventional diagram of a DC series motor
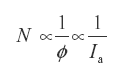
- N − Ia Characteristics: We know that where, Eb = V − Ia(Ra + Rse). When armature current increases, the induced emf (back emf) Eb decreases, due to Ia (Ra + Res) drop. While flux ɸ increases as ɸ ∝ Ia before magnetic saturation. However, under normal conditions, Ia (Ra + Rse) drop is quite small and may be neglected.Considering Eb to be constant,
 Thus, before magnetic saturation, the N − Ia curve follows the hyperbolic path as shown in Figure 11.50. In this region, the speed decreases abruptly with the increase in load or armature current.After magnetic saturation, flux becomes constant, then, N ∝ Eb ∝ V − Ia (Ra + Rse)Thus, after magnetic saturation, the N − Ia curve follows a straight line path and speed decreases slightly, as shown in Figure 11.50. From this characteristic, it is concluded that the series motor is a variable speed motor, that is, its speed changes when the armature current (or load) changes. As the load on this motor decreases, speed increases. If this motor is connected to the supply without load, armature current will be very small and hence speed will be dangerously high that may damage the motor due to heavy centrifugal forces.
Thus, before magnetic saturation, the N − Ia curve follows the hyperbolic path as shown in Figure 11.50. In this region, the speed decreases abruptly with the increase in load or armature current.After magnetic saturation, flux becomes constant, then, N ∝ Eb ∝ V − Ia (Ra + Rse)Thus, after magnetic saturation, the N − Ia curve follows a straight line path and speed decreases slightly, as shown in Figure 11.50. From this characteristic, it is concluded that the series motor is a variable speed motor, that is, its speed changes when the armature current (or load) changes. As the load on this motor decreases, speed increases. If this motor is connected to the supply without load, armature current will be very small and hence speed will be dangerously high that may damage the motor due to heavy centrifugal forces.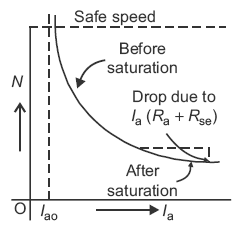 Fig. 11.50 N-Ia characteristics of a DC series motorTherefore, a series motor is never started on no-load. However, to start a series motor, mechanical load (not belt driven load because belt slips over the pulley) is put on it first and then started.
Fig. 11.50 N-Ia characteristics of a DC series motorTherefore, a series motor is never started on no-load. However, to start a series motor, mechanical load (not belt driven load because belt slips over the pulley) is put on it first and then started.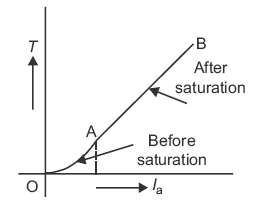 Fig. 11.51 T-Ia characteristics of a DC series motor
Fig. 11.51 T-Ia characteristics of a DC series motor - T − Ia characteristics: We know that, T ∝ ɸ Ia. In series motors, before magnetic saturation ɸ ∝ Ia. Hence, before magnetic saturation, the electromagnetic torque produced in the armature is proportional to the square of the armature current. Therefore, this portion of the curve (OA) is a parabola passing through the origin, as shown in Figure 11.51. However, after magnetic saturation, the flux ɸ becomes constant.Therefore, T ∝ IaHence, after magnetic saturation, the curve (AB) becomes a straight line. It is seen that before magnetic saturation T ∝
 . When load is applied to this motor at start, it takes large current and heavy torque is produced that is proportional to square of this current. Thus, this motor is capable to pick up heavy loads at the start and best suited for electric traction.
. When load is applied to this motor at start, it takes large current and heavy torque is produced that is proportional to square of this current. Thus, this motor is capable to pick up heavy loads at the start and best suited for electric traction. - N − T characteristics: This characteristic is derived from the first two characteristics. At low value of load, Ia and torque are small, but the speed is very high. As load increases, Ia and torque increases, but the speed decreases rapidly. Thus, for increasing torque, speed decreases rapidly as shown in Figure 11.52.
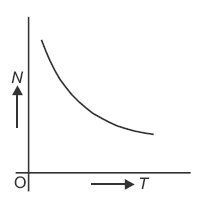 Fig. 11.52 N-T characteristics of a DC series motor
Fig. 11.52 N-T characteristics of a DC series motor
Leave a Reply