The origins of the word “robot” go back to 1921 in a play by Karel Capek called Rossum’s Universal Robots. It’s about a factory that created robots from organic matter, and yes, they were hostile! They would eventually join together to rebel against their human masters (consider that “robot” comes from the Czech word robata for forced labor).
But as of today, what is a good definition for this type of system? Keep in mind that there are many variations, as robots can have a myriad of forms and functions.
But we can boil them down into a few key parts:
- Physical: A robot can range in size, from tiny machines that can explore our body to massive industrial systems to flying machines to underwater vessels. There also needs to be some type of energy source, like a battery, electricity, or solar.
- Act: Simply enough, a robot must be able to take certain actions. This could include moving an item or even talking.
- Sense: In order to act, a robot must understand its environment. This is possible with sensors and feedback systems.
- Intelligence: This does not mean full-on AI capabilities. Yet a robot needs to be able to be programmed to take actions.
Nowadays it’s not too difficult to create a robot from scratch. For example, RobotShop.com has hundreds of kits that range from under $10 to as much as $35,750.00 (this is the Dr. Robot Jaguar V6 Tracked Mobile Platform).
A heart-warming story of the ingenuity of building robots concerns a 2-year old, Cillian Jackson. He was born with a rare genetic condition that rendered him immobile. His parents tried to get reimbursement for a special electric wheelchair but were denied.
Well, the students at Farmington High School took action and built a system for Cillian.3 Essentially, it was a robot wheelchair, and it took only a month to finish. Because of this, Cillian can now chase around his two corgis around the house!
While above we looked at the features of robots, there are key interactions to consider too:
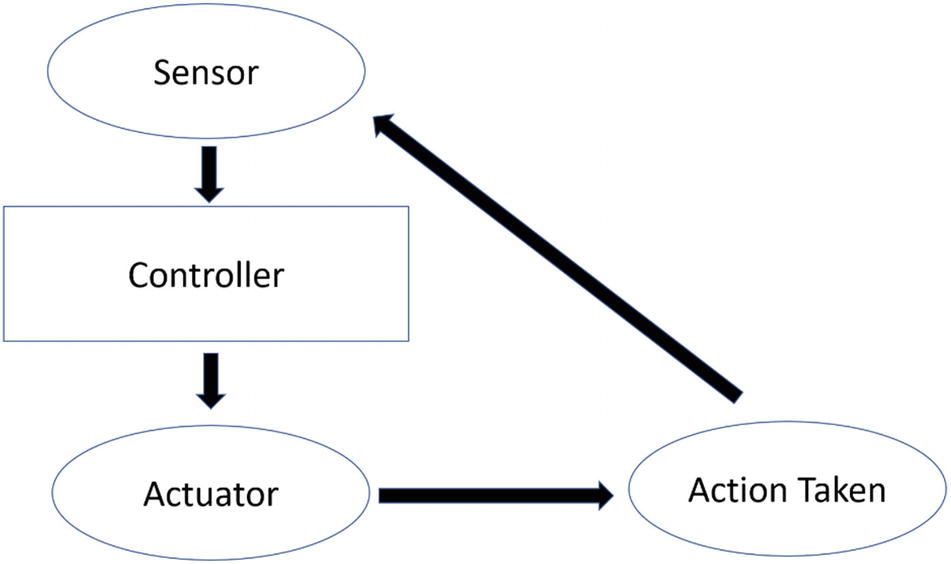
- Sensors: The typical sensor is a camera or a Lidar (light detection and ranging), which uses a laser scanner to create 3D images. But robots might also have systems for sound, touch, taste, and even smell. In fact, they could also include sensors that go beyond human capabilities, such as night vision or detecting chemicals. The information from the sensors is sent to a controller that can activate an arm or other parts of the robot.
- Actuators: These are electro-mechanical devices like motors. For the most part, they help with the movement of the arms, legs, head, and any other movable part.
- Computer: There are memory storage and processors to help with the inputs from the sensors. In advanced robots, there may also be AI chips or Internet connections to AI cloud platforms.
Figure 7-1 shows the interactions of these functions.
There are also two main ways to operate a robot. First of all, there is remote control by a human operation. In this case, the robot is called a telerobot. Then there is the autonomous robot, which uses its own abilities to navigate—such as with AI.
So what was the first mobile, thinking robot? It was Shakey. The name was apt, as the project manager of the system, Charles Rosen, noted: “We worked for a month trying to find a good name for it, ranging from Greek names to whatnot, and then one of us said, ‘Hey, it shakes like hell and moves around, let’s just call it Shakey.’”4
The Stanford Research Institute (SRI), with funding from DARPA, worked on Shakey from 1966 to 1972. And it was quite sophisticated for the era. Shakey was large, at over five feet tall, and had wheels to move and sensors and cameras to help with touching. It was also wirelessly connected to DEC PDP-10 and PDP-15 computers. From here, a person could enter commands via teletype. Although, Shakey used algorithms to navigate its environment, even closing doors.
The development of the robot was the result of a myriad of AI breakthroughs. For example, Nils Nilsson and Richard Fikes created STRIPS (Stanford Research Institute Problem Solver), which allowed for automated planning as well as the A∗ algorithm for finding the shortest path with the least amount of computer resources.5
By the late 1960s, as America was focused on the space program, Shakey got quite a bit of buzz. A flattering piece in Life declared that the robot was the “first electronic person.”6
But unfortunately, in 1972, as the AI winter took hold, DARPA pulled the funding on Shakey. Yet the robot would still remain a key part of tech history and was inducted into the Robot Hall of Fame in 2004.7
Leave a Reply