The controlling or restoring or balancing torque is provided in the indicating instruments by two methods, namely spring control and gravity control.
9.4.1 Spring Control
In this method, two phosphor bronze spiral hair-springs A and B are attached to the moving system (spindle) of the indicating instrument as shown in Figure 9.6(a). However, only one spring is used in moving iron instruments. In fact, one end of each spring is attached with the spindle and the other end is attached to some fixed point (may be outer frame or body of the instrument). The two springs are wound in opposite direction to compensate for change in temperature. The moving system is statically balanced in all positions by providing balancing weights as shown in Figure 9.6(a). To adjust the zero of the pointer, an arrangement, called zero adjuster is provided on the pointer as shown in Figure 9.6(b).
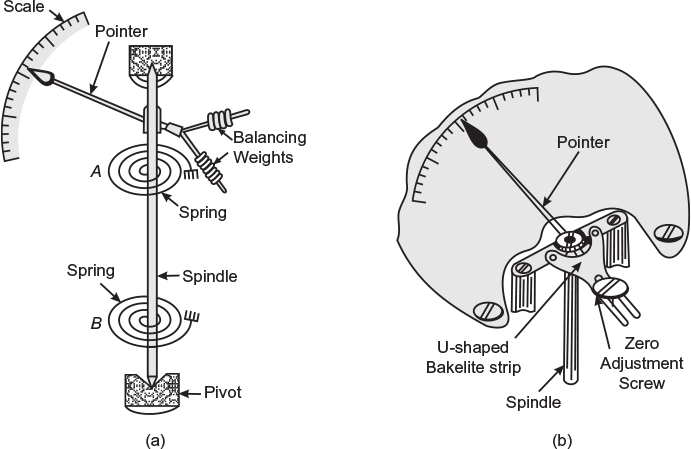
Fig. 9.6 Spring control to provide controlling torque (a) Two springs attached to the spindle in opposite direction (b) Pointer with zero adjuster
Under ordinary conditions, when instrument is not in use, the two springs are in their natural position, the controlling torque is zero and the pointer is at zero position. When the instrument is connected in the circuit, deflecting torque (Td) deflects the pointer. With the deflection of the pointer, one of the springs is unwound, while the other gets twisted. The resultant twist in the springs provides controlling torque (Tc) that is directly proportional to the angle of deflection θ of the moving system, that is, T ∝ θ. The pointer comes to the position of rest when controlling torque is equal to deflecting torque, that is, Tc = Td.
If
Td ∝ I (in the case of permanent magnet moving coil instrument), then
I ∝ θ (since Tc ∝ θ and Td = Tc)
Hence, in spring-controlled instruments (only in which Td ∝ I), scales are uniform.
Important points for consideration
The spring should have a fairly large number of turns so that the deformation per unit length is kept small on full-scale deflection. Moreover, it also ensures that controlling torque is proportional to the angle of deflection. However, the stress in spring should be limited to such a value that there is no permanent set in it.
Advantages
- When controlling torque is provided by spring, the instrument can be placed in any position.
- The hair spring has almost negligible weight, and therefore, practically there is no increase in weight of the moving system.
- Spring-controlled instruments (only in which Td ∝ I) have uniform scales.
Disadvantages
- The change in temperature affects the length of spring, and hence, the controlling torque.
- Since the springs are very delicate, the accidental stresses may damage them.
- Due to fatigue, springs deteriorate with time.
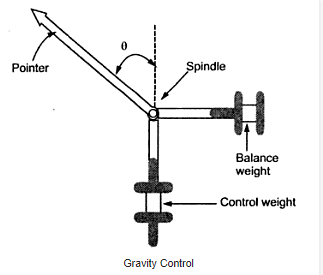
9.4.2 Gravity Control
In this method, a small adjustable weight W is attached to the moving system in such a way that it produces a controlling torque when the moving system is in deflected position. The controlling torque can be varied by adjusting the position of the control weight upon the arm as shown in Figure 9.7(a).
At zero position of the pointer, the control weight W is in the vertical position, and therefore, no controlling torque is produced. However, under the action of deflecting torque, the pointer is deflected through an angle θ from its zero position, as shown in Figure 9.4(a) (dotted position). Due to gravity, the control weight would try to come back to its original (i.e., vertical) position and produces controlling torque. Under the stationary position, controlling torque must be equal to deflecting torque (i.e., Tc = Td).
Let,
W = control weight,
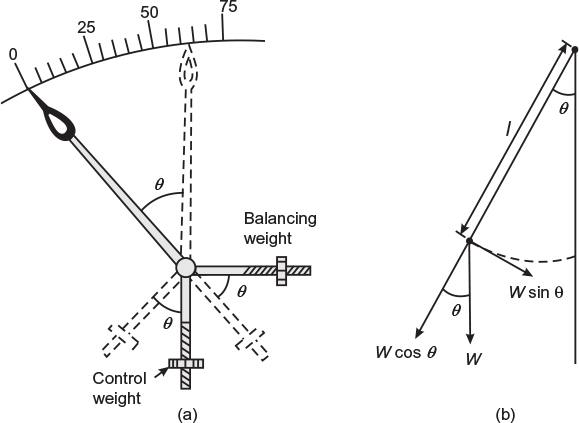
Fig. 9.7 Gravity control to provide controlling torque (a) Position of pointer with and without deflection (b) Forces acting on weight at deflected position
l = distance of control weight from axis of rotation and
θ = angle through which pointer or weight has deflected.
In the deflected position, weight W can be resolved into two components, that is, W cosθ and W sinθ. Only the component W sinθ provides the controlling torque.
Tc = Wl sinθ
or
Tc ∝ sinθ (since W and l have fixed values)
If
Td ∝ I, then
I ∝ sinθ (Td = Tc at the position of rest)
Hence, in gravity-controlled instruments, scales are not uniform, but are crowded in the beginning.
Advantages
- It is very cheap.
- It is a very simple method.
- It is not affected by change in temperature.
- It is free from fatigue and does not deteriorate with time.
- The controlling torque can be varied easily.
Disadvantages
- The instruments in which controlling torque is provided, with gravity control method, have non-uniform scales.
- The instrument has to be kept in vertical position.
- The control weight adds to the weight of the moving system that decreases torque or weight ratio and reduces the sensitivity of the instrument.
Leave a Reply